Программирование, восстановление, наладка, модернизация ЧПУ станков и оборудования







Количество: 0
| Договорная Цена без НДС | : |
|
Организация: Станкоремонтный завод
Разместил: Решетников Виктор Василевич +7(4822)41
Группа товаров: Купить Металлообрабатывающее оборудование (Оборудование, приборы, инструменты)
Регион: г. Москва
Сделка: Продажа
Состояние: Б/у
Размещено: 6 мар., 15:57
Просмотров: 861
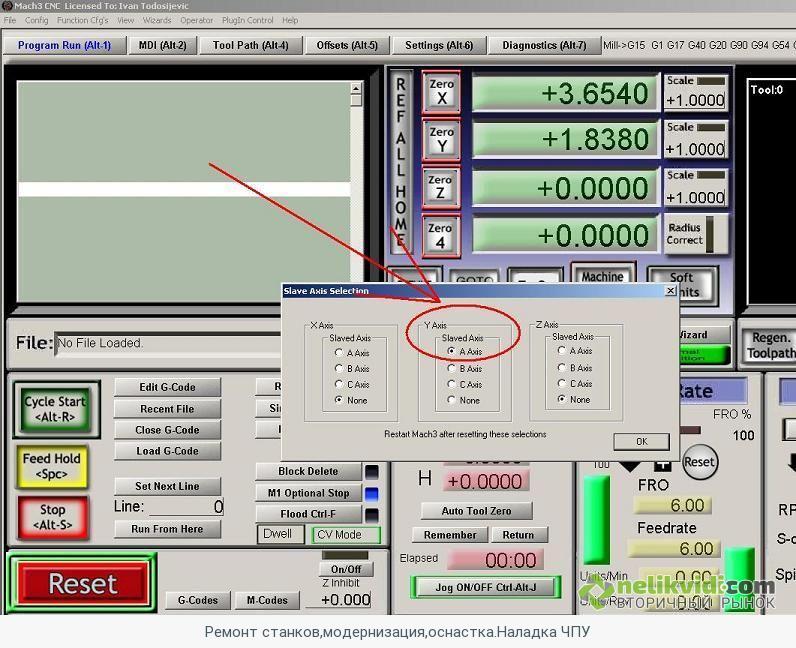
Программирование, восстановление, наладка, модернизация ЧПУ станков и оборудования. Станкоремонтный завод выполняет пуско-наладку, все виды ремонта станков,прессов. Производим ремонт электронных и механических узлов, гидравлических систем. Ремонт металлообрабатывающих станков. капитально-восстановительный ремонт средний ремонт механической части средний ремонт электротехнической части Модернизация металлообрабатывающих станков. модернизация механической части модернизация электротехнической части модернизация систем УЧПУ Техническое обслуживания станков. ТО1, ТО2 текущий ремонт Программирование и наладка станков с ЧПУСтанкоремонтный завод предлагает: модернизация станков с ЧПУ наладка и сдача в эксплуатацию станков с ЧПУ, автоматических линий техническое обслуживание станков проектирование узла электрооборудования станков комплектация электрооборудования станков программирование станков с ЧПУ любой сложности разработка технологических программ обработки деталей обучение операторов работе на станках с ЧПУ Разработка технологического процесса изготовления детали по заданному чертежу(любой сложности)‚составление УП, как непосредственно по чертежу на стойку, так и в САПР - Mastercam,ArtCAM ‚CIMCO. Наладка, и запуск станка в работу. Стойки Fanuс,HAAS,Siemens, НЦ, 2Р22.
Параметри́ческое программи́рование (англ. parametric programming, также — ма́кропрограммирование) в обрабатывающих системах числового программного управления (ЧПУ) технологическим оборудованием — подход к повышению уровня программирования, реализуемый созданием специализированных языков или расширений к существующим средствам программирования.
Исторически первый язык программирования станков с ЧПУ — G-код по своей сути является языком описания циклограмм движения обрабатывающего инструмента, включения/выключения шпинделя, подачи смазочно-охлаждающих жидкостей (СОЖ) и других действий и не имеет средств текущей проверки состояния процесса обработки. Например, при поломке обрабатывающего инструмента или отсутствии СОЖ, циклограмма, описанная G-кодом, будет бесполезно продолжаться или исполняться опасно для оборудования до вмешательства оператора или окончания G-кода. Для устранения этого существенного недостатка G-кода и были разработаны языки параметрического программирования.
Эти языки имеют много общего с обычными высокоуровневыми языками программирования, например, Фортран, Си. Основное преимущество по сравнению с G-кодом — наличие команд/операторов условного перехода. Это расширение позволяет изменять ход обработки при изменении состояния процесса, например, останавливать обработку с подачей аварийного сигнала при срабатывании датчика износа или поломки инструмента.
Дополнительное преимущество параметрического программирования для станков с ЧПУ — возможность организации сложных вычислений координат инструмента и его перемещений для обработки криволинейных поверхностей, заданных математически в виде 3D-сплайнов или поверхностей Безье.
Производители систем управления используют параметрическое программирование в качестве расширения G-кода. Его можно сравнить с компьютерными языками программирования, такими, как Basic, но он может быть доступен на уровне G-функций (кодов). В отличие от ЧПУ-программирования, в параметрическом программировании расширяются возможности, сравнимые с объектно ориентированными. Используя его системах управления ЧПУ, становится возможным вариантность вычисления, применение логических операторов, работа с проходами инструмента, движениями манипуляторов. Возможность организации циклов, выбор по условию, переход, работа с подпрограммами. Добавляются элементы, осуществляющие полный контроль над ЧПУ, — доступ к системным переменным и ячейкам программы электроавтоматики, возможность создавать свои собственные G-коды и функции, которые наиболее полно реализуют управление всех компонентов станка. Возможен доступ к параметрам ЧПУ, хранящим информацию об инструменте, положении рабочих органов, манипуляторов, системы координат, значений G-кода управляющей программы и ошибок. С помощью параметрического программирования можно разрабатывать диалоговые управляющие программы. Подобно компьютерным языкам программирования, в параметрическом программировании их существует несколько версий: Custom Macro, User Task (Okuma), Q Routine (Sodick), Advanced Programming Language (APL G& L). Например, язык макропрограммирования FMS-3000 из подмножества языка Basic дает возможность организовать дополнительные информационные окна, систему слежения за параметрами, режимы контроля и протоколирования процессов обработки. Такие программы выполняются в фоновом режиме и в свободное от всех других задач время, при большой загрузке могут временно приостанавливать свою работу. Используя такие возможности, имеешь один из эффективных способов управления станком, роботом, системой ЧПУ.
В качестве примера макропрограммы можно написать подпрограмму функцию G200 для системы управления FMS-3000 и использовать эту G-функцию в качестве отскока и перехода инструмента между проходами, как в случае перехода сверла от одной координате к другой.
Программа, написанная с использованием языка макропрограммирования, имеет аналогичную структуру G-кодов системы управления. Структурную единицу составляет кадр. Кадр является последовательностью символов языка программирования. Элементом кадра является слово, которое состоит из адреса и числового значения или переменной, глобальной переменной.
Свойства функции:
1. Начальные условия.
2. Отскок на W (в случае простого отскока) или выход в точку смены инструмента, и следуем далее.
3. Выбор инструмента взятие корректора на длину.
4. Выбор G54 G55 G56 G57 G58 G59.
5. Определяем угол поворота детали A
6. Выбор M3 M13 M4 M14.
7. Выбор числа оборотов S.
8. Выход инструмента на позицию по X Y (с коррекцией H).
- Московская область
- E-Mail доступен для зарегистрированных
- +7(4822)41
- Объявления на продажу: 10
